Контрольная работа: Основы метрологии, взаимозаменяемости и стандартизацииКонтрольная работа: Основы метрологии, взаимозаменяемости и стандартизацииСОДЕРЖАНИЕ Введение 1.Структурные схемы приборов прямого и уравновешенного преобразования 1.1.Средства измерений прямого преобразования 1.2.Средства измерений уравновешивающего преобразования 2.Время-импульсный цифровой вольтметр 3.Задача 1.14 4.Задача 4.07 5.Задача 6.07 Выводы Литература Приложение ВВЕДЕНИЕ Проблема качества изделий электронной техники охватывает широкий круг вопросов, при решении которых существенное значение имеют взаимозаменяемость, стандартизация и технические измерения. Взаимозаменяемость связывает в единое целое конструирование, технологию производства и контроль изделий. Стандартизация и унификация деталей и элементов конструктивной и схемотехнической базы электронной аппаратуры способствуют ускорению и удешевлению конструирования и производства изделий. Разработка, изготовление и эксплуатация электронной аппаратуры сопряжено с выполнением большого числа измерений. При этом получаемая измерительная информация может быть использована как в целях собственно измерения (нахождения значений физических величин), так и для выработки соответствующих суждений в процедурах контроля и диагностики и управляющих воздействий в системах управления. Так как измерительная техника является основным средством получения объективной информации о свойствах используемых объектов, то повышение качества продукции находится в прямой зависимости от степени метрологического обеспечения производства и состояния измерительной техники. Совершенствование электронной аппаратуры требует опережающего развития метрологии., поскольку для разработки аппаратуры с улучшенными техническими характеристиками необходимы более точные методы и средства технического контроля. Цель курса «Основы метрологии, взаимозаменяемости и стандартизации» - дать представление о месте и роли метрологии, взаимозаменяемости и стандартизации в решении задач повышения технического уровня и качества изделий электронной техники; дать основы знаний по теории измерений и теории погрешностей измерений; дать общие сведения о взаимозаменяемости и ее размерной составляющей, о размерах и допусках на размер, о различных характерах соединений деталей и способах их обеспечения; дать основные понятия в области стандартизации, ее нормативных документах, о стандартизации в различных сферах деятельности человека. Цель контрольной работы – изучить основные понятия и опреределения в области метрологии, основные вопросы теории измерений, теорию погрешностей измерений. 1. Структурные схемы приборов прямого и уравновешенного преобразования 1.1 Средства измерений прямого преобразования Структурная схема средства измерений прямого преобразования показана на рис. 1.1, где П1, П 2,.... Пn — звенья; х1, x2, ..., хп — информативные параметры сигналов. В дальнейшем при математическом анализе информативные параметры будут именоваться сигналами или величинами.
Рис. 1.1. Структурная схема средства измерений прямого преобразования Как видно из рис. 1.1, входной сигнал х последовательно претерпевает несколько преобразований и в конечном итоге на выходе получается сигнал хп. Для измерительного прибора сигнал хп получается в форме, доступной для непосредственного восприятия наблюдателем, например в виде отклонения указателя отсчетного устройства. Для измерительного преобразователя сигнал х„ получается в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения. Примером электроизмерительного прибора, имеющего структурную схему прямого преобразования, может быть амперметр для измерения больших постоянных токов. В этом приборе измеряемый ток вначале с помощью шунта преобразуется в падение напряжения на шунте, затем в малый ток, который измеряется измерительным механизмом, т. е. преобразуется в отклонение указателя. Чувствительность (коэффициент преобразования) средства измерений, имеющего структурную схему прямого преобразования, S=
где k1 = Мультипликативная погрешность возникает при изменении коэффициентов преобразования. С течением времени и под действием внешних факторов коэффициенты k1, k2.....kn могут изменяться соответственно на Δk1, Δk2,….., Δkn. При достаточно малых изменениях этих коэффициентов можно пренебречь членами второго и большего порядка малости, и тогда относительное изменение чувствительности ΔS/S = Δkl/kl+Δk2/k2 + ...+Δkn/kn. (1.2) Изменение чувствительности приводит к изменению выходного сигнала на Δхп=(S+ΔS)x-Sx=ΔSx. Этому изменению выходного сигнала соответствует абсолютная погрешность измерения входной величины Δхп= Δхп /S= xΔS/S. (1.3) Как видно из выражения (1.3), погрешность, вызванная изменением чувствительности, является мультипликативной. Относительная мультипликативная погрешность измерения δм = = ΔS/S. Аддитивная
погрешность вызывается
дрейфом «нуля» звеньев, наложением помех на полезный сигнал и т. д., приводящих
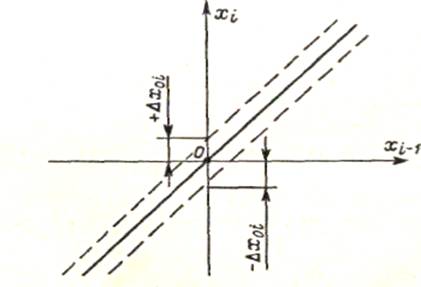
к смещению графика характеристики преобразования i-го звена на
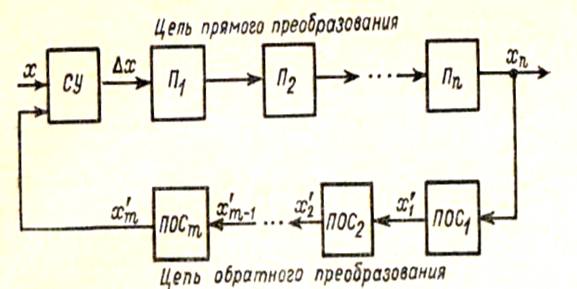
Рис. 1.2. Характеристика преобразования звена Для оценки влияния этих дополнительных сигналов пересчитаем (приведем) их к входу структурной схемы. Результирующее действие всех дополнительных сигналов равно действию следующего дополнительного сигнала на входе: Δx0 = Δx01/k1+ Δx02/(k1k2)+... + Δx0n/(k1k2...kn). (1.4) Результирующая аддитивная погрешность равна Δхо. Таким образом, как следует из (1.2) и (1.3), в средствах измерений, имеющих структурную схему прямого преобразования, происходит суммирование погрешностей, вносимых отдельными звеньями, и это затрудняет изготовление средств измерений прямого преобразования с высокой точностью. 1.2 Средства измерений уравновешивающего преобразования Структурная схема средства измерений уравновешивающего преобразования показана на рис. 1.3.
Рис. 1.3. Структурная схема средства измерений уравновешивающего преобразования Для цепи обратного преобразования (обратной связи) xm` = xnβ1 β2 …. βm = xnβ (1.5) где β — коэффициент преобразования цепи обратного преобразования; β1 , β2, .., βm— коэффициенты преобразования звеньев обратной связи. На входе цепи прямого преобразования в узле СУ происходит сравнение (компенсация) входного сигнала х и выходного сигнала цепи обратного преобразования х'm и при этом на выходе СУ получается разностный сигнал Δх = х — х'm. При подаче на вход сигнала х выходной сигнал хn, а следовательно, и х'm, будут возрастать до тех пор, пока х и х'т не станут равны. При этом по значению хn можно судить об измеряемой величине х. Средства измерений, имеющие такую структурную схему, могут работать как с полной, так и с неполной компенсацией. При полной компенсации в установившемся режиме Δх = х — хт = 0. (1.6) Это возможно в тех устройствах, у которых в цепи прямого преобразования
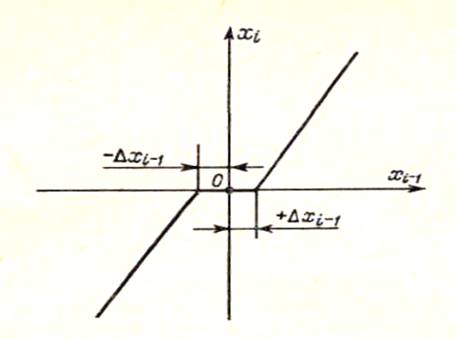
предусмотрено интегрирующее звено с характеристикой преобразования хi= хn = х/(β1 β2... βm)=х/ β. (1.7) Таким образом, в момент компенсации сигнал на выходе средства измерений пропорционален входному сигналу и не зависит от коэффициента преобразования цепи прямого преобразования. Чувствительность (коэффициент преобразования) S= Мультипликативная относительная погрешность, обусловленная нестабильностью коэффициентов преобразования звеньев, при достаточно малых изменениях этих коэффициентов Как видно из этого выражения, относительная мультипликативная погрешность обусловлена только относительным изменением коэффициента преобразования цепи обратного преобразования. Аддитивная погрешность в средствах измерений с полной компенсацией практически обусловливается порогом чувствительности звеньев, расположенных до интегрирующего звена, и порогом чувствительности самого интегрирующего звена. Под порогом чувствительности звена понимается то наименьшее изменение входного сигнала, которое способно вызвать появление сигнала на выходе звена. Порог чувствительности имеют, например, электродвигатели, часто применяемые в рассматриваемых устройствах. Для реальных звеньев график характеристики преобразования может иметь вид, показанный на рис. 1.4, где ± Δхi-1 — порог чувствительности.
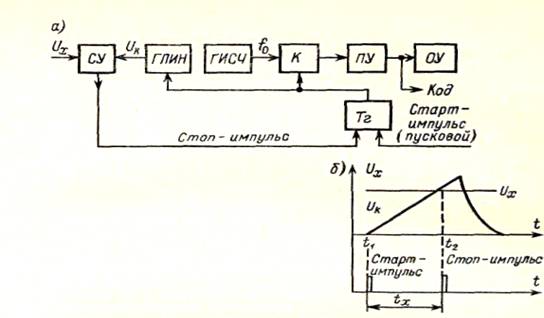
Рис. 1.4. Характеристика преобразования звена с порогом чувствительности При наличии порога чувствительности средства измерений состояние компенсации наступает при х — х'т = Δх. Таким образом, изменение входного сигнала в пределах ±Δx не вызывает изменения выходного сигнала, т. е. появляется абсолютная аддитивная погрешность, значение которой может быть в пределах ± Δх. При неполной компенсации в средствах измерений интегрирующего звена нет и обычно выполняется условие (1.5), а также xn = kΔx, (1.9) где k = k1 k2...kn — коэффициент преобразования цепи прямого преобразования. В этом случае установившийся режим наступает при некоторой разности Δх = х — х'т. (1.10) Зависимость между выходным и входным сигналами, находимая путем решения уравнений (1.5), (1.9) и (1.10), xn = kx/(l+kβ). (1.11) Как видно из выражения (1.11), при установившемся режиме выходной сигнал пропорционален входному и зависит от коэффициентов преобразования цепи как обратного, так и прямого преобразования. Если выполняется условие kβ»l, то уравнение (1.11) переходит в (1.7) и при этом нестабильность коэффициента преобразования цепи прямого преобразования не влияет на работу устройства. Практически, чем выше kβ, тем меньше влияние k. Предел увеличения kβ обусловлен динамической устойчивостью средства измерений. Чувствительность (коэффициент преобразования) средства измерений с неполной компенсацией S= Мультипликативная погрешность, обусловленная изменением коэффициентов преобразования звеньев при достаточно малых изменениях этих коэффициентов. Следовательно, при kβ>>1 (что обычно имеет место) составляющая, обусловленная изменением коэффициента β, целиком входит в результирующую погрешность, а составляющая, обусловленная изменением коэффициента k, входит в результирующую погрешность ослабленной в kβ раз. Нелинейность характеристики преобразования цепи прямого преобразования можно рассматривать как результат влияния изменения коэффициента преобразования k относительно некоторого начального значения при х = 0. Полученные уравнения показывают, что нелинейность характеристики преобразования уменьшается действием отрицательной обратной связи в kβ раз. Аддитивная погрешность может быть найдена путем введения в структурную схему дополнительных сигналов Δxo1, Δхо2,-.., Δxon, Δx`o1, Δх`o2,..., Δх`oт, равных смещениям характеристик преобразования соответствующих звеньев. Применяя методику, рассмотренную выше, получим абсолютную аддитивную погрешнось, равную погрешности Δxo=[Δxo1/k1 + Δxo1/(k1k2) +…. + Δxo1/(k1 k2...kn)]— (β2β3….βmΔx`o1 + β3β4…..βmΔx`o2 + …+ Δx`om). (1.13) Следует отметить, что средства измерений могут иметь комбинированные структурные схемы, когда часть цепи преобразования охвачена обратной связью. Вид структурной схемы средства измерений влияет не только на рассмотренные характеристики (чувствительность, погрешность), но также на входные и выходные сопротивления, динамические свойства и др. 2. Время-импульсный цифровой вольтметр В этих вольтметрах (рис. 2, а и б) измеряемое напряжение Ux предварительно преобразуется во временной интервал tx путем сравнения Ux с линейно-изменяющимся напряжением Uk.
Рис. 2. Схема (а) и диаграммы напряжений (б) время-импульсного вольтметра При запуске прибора старт-импульсом в момент t1 срабатывает триггер Тг, который открывает ключ К и запускает генератор линейно-изменяющегося напряжения ГЛИН. Напряжение UK на выходе генератора ГЛИН начинает изменяться по линейному закону, и на вход ПУ подаются квантующие импульсы. В момент t2 при UK=UX сравнивающее устройство СУ стоп-импульсом через триггер и ключ прекращает подачу импульсов в ПУ. Таким образом, за время tx=t2 — t1 = Ux/k (где k — коэффициент, характеризующий скорость изменения напряжения Uк) на вход ПУ пройдет число импульсов N=tx/T0=Uxf0/k. (2.1) Составляющие погрешности прибора: 1) погрешность квантования, зависящая от tx/To; 2) погрешность реализации от нестабильности fо; 3) погрешность от наличия порога срабатывания СУ; 4)погрешность от нелинейности и нестабильности кривой линейно-изменяющегося напряжения, т. е. от непостоянства k; эта составляющая практически определяет точность этих вольтметров. В настоящее время у время-импульсных ЦИУ погрешность снижена до ±0,05 %. Показания этих ЦИУ определяются мгновенным размером входного сигнала, а поэтому эти ЦИУ чувствительны к помехам. 3. Задача 1.14 Найти результат и погрешность косвенного измерения частоты по результатам прямых измерений реактивного сопротивления и индуктивности катушки с независимыми случайными погрешностями, распределенными по нормальному закону. XL
= (1,10 L
=
(105 Записать результат в стандартной форме для Р = 0,92. Решение: 1) Определяем результат косвенного измерения частоты по формуле ω = 2) Определяем СКО случайной погрешности косвенного измерения σ(Y). Для этого сначала находим СКО погрешности измерений XL и L: σ(XL)= где Δ1 = 0,02 Ом – половина доверительного интервала случайной погнрешности измерения реактивного сопротивления катушки; Z1 – значение аргумента Z для функции Лапласа Ф(Z)=
По таблице П.1 приложения для Ф(Z)=0,48 находим ZXL = 2,05 Отсюда σ(XL)= Аналгогично для
нахождения σ(L) определяем Ф(Z)=
По таблице П.1 приложения для Ф(Z)=0,47 находим ZL = 1,87. Отсюда σ(L)= Затем определяем частные производные:
Наконец, находим СКО σ(ω)
=
3) Определим доверительный интервал для погрешности косвенного измерения частоты. Для Ф(Z) = Отсюда Δω= σ(ω)·Zω=0,9761·1,75 ≈ 1,71 Гц. 4) Записываем результат измерения в стандартной форме: ω
=
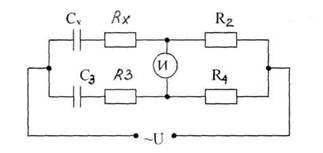
(10,476 4. Задача 4.07 Измерительный мост собран по схеме, приведенной на рисунке 4.1. Определить емкость конденсатора Сх и тангенс угла диэлектрических потерь tgδ, если баланс моста достигается при значениях R2, R3, R4, С3, указанных ниже, а частота питающего мост переменного напряжения f. f = 700Гц; С3= 2000 пФ = 2000·10-12 Ф; R2 = 40 кОм = 40·103 Ом; R3 = 40 кОм = 40·103 Ом; R4 = 20 кОм = 20·103 Ом. Сх - ? tgδ - ?
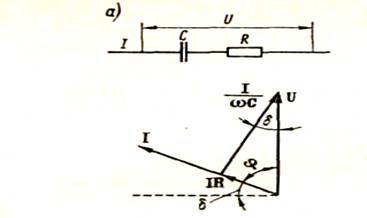
Рис. 4.1. Схема к задаче 4.07 Решение: Для измерения емкости конденсаторов с малыми потерями показана на Рис. 4.1. Для анализа используем эквивалентную схему Рис. 4.2. Полные сопротивления плеч в данном случае: Z1 = Rx + Z2 = R2 ; Z3 = R3 + Z4 = R4 .
Рис. 4.2.Последовательная (а) эквивалентная схема и векторная диаграмма конденсатора с потерями Подставив эти выражения в формулу равновесия моста, будем иметь
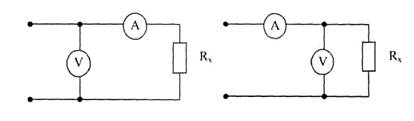
Отсюда получим условие равновесия моста: Сx = C3 ·R4 / R2 ; Rx = R3 ·R2 / R4 . Сx = 2000·10-12 ·20·103 / 40·103 = 1000·10-12 (Ф); Rx = 40·103 ·40·103 / 20·103 = 80·103 (Ом) = 80 кОм. Угол потерь δ, дополняющий до 90º угол фазового сдвига тока относительнго напряжения, определяется из выражения tgδ = ω· Сx · Rx = ω· С3 · R3 ; ω = 2πf ; tgδ = 2· 3,14·700·1000·10-12 ·80·103 = 351680000· 10-9 = 0,35168, откуда δ = 19º21`. 5. Задача 6.07 Для измерения сопротивления Rx используют амперметр с внутренним сопротивлением RA и вольтметр с внутренним сопротивлением Rv. При составлении схемы измерений вольтметр включается до амперметра и измеряет падение напряжения на амперметре и измеряемом сопротивлении или после амперметра (рис. 5). Определить, какая из двух схем дает меньшую погрешность измерения. Исходные данные для расчета приведены ниже.
а) б) Рис. 5. Схемы к задаче 6.07 Rx = 25 Ом; RA = 5 Ом; Rv = 15 кОм = 15·103 Ом. Решение: Измерение токов и напряжений всегда сопровождаются погрешностью, обусловленной сопротивлением используемого средства измерений. Включение в исследуемую цепь средства измерений искажает режим этой этой цепи. Включение амперметра, имеющего сопротивление RA в цепь, изображенную на Рис. 5,а, приведет к тому, что вместо тока I= U/R, который протекал в этой цепи до включения амперметра, после включения амперметра пойдет ток I1= U/(Rх+ RA). Погрешность Δ I= I1- I = U/(Rх+ RA) - U/Rх Для наглядного представления, примем U= 10 В. Тогда I= 0,4 А; I1= 0,3333 А; Δ I=0,0666 А и чем выше U, тем больше погрешность. Показания же вольтметра почти не изменилось, т.к. RA меньше Rх. По схеме, представленной на Рис. 5,б, при включении вольтметра параллельно резистору Rх , имеющего сопротивление Rv, для измерения напряжения на резисторе Rх, режим цепи тоже нарушается, т.к. вместо напряжения Uv = U· Rх/ (Rх+ RA), которое было в схеме до включения вольтметра, после его включения напряжение Uv1 = Uv = 8,333 В. Тогда, погрешность ΔU = Uv - Uv1 = 0,0017 (В). Поэтому можно сделать вывод: 1) Погрешность для Рис. 5,а тем выше, чем выше сопротивление амперметра; 2) Погрешность для Рис.5,б тем выше, чем меньше сопоротивление вольтметра - поэтому первая схема дает меньшую погрешность измерения. Выводы При изучении получены знания по использованию методов и средств измерений, ознакомились с принципами работы и устройством основных измерительных приборов и систем, приобрели навыки проведения измерений. ЛИТЕРАТУРА 1. Основы метрологии и электрические измерения. /Под ред. Е.М. Душина/ - Л. «Энергоатомиздат», 1987 – 480с. 2. Метрология, стандартизация и измерения в технике связи. /Под ред. Б.П. Хромого/. – М «Радио и связь», 1986 – 424с. 3. Кукуш В.Д. Электрорадиоизмерения – М. «Радио и связь», 1985 – 368с. 4. Винокуров В.И., Каплин С.И., Петелин И.Г. Электрорадиоизмерения – М, «Высшая школа»,1986 –351с. 5. Методические указания к изучению курса «Основы метрологии и измерительной техники» / Сост. Ф.Я. Шухат – Северодонецк; Изд-во СТИ, Восточноукр. Нац. Ун-та, 2000, 27 с. 6. Васильев А.С. Основы метрологии и технические измерения- М., Машиностроение, 1988 – 240 с. 7. Основы метрологии и электрические измерения: Учебник / Под ред. Е.М.Душина – Л., Энергоатомиздат, 1987 – 480 с. 8. Цюцюра С.В., Цюцюра В.Д. Метрологія, основи вимірювань, стандартизація та сертифікація: Навч. посіб. – К., Знання, 2005 – 242с. ПРИЛОЖЕНИЕ Таблица П.1 Значение нормированной функции
Лапласа Ф(Z)
|