Контрольная работа: Расчет основных параметров двигателя постоянного токаКонтрольная работа: Расчет основных параметров двигателя постоянного токаСодержание Содержание 1. Исходные данные. Задача 2. Решение задачи 3. Исходные данные. Задача 4. Решение задачи Исходные данные 1. Исходные данные. Задача В таблице 1 приведены данные двигателя постоянного тока Таблица 1.
Для двигателя постоянного тока с параллельным возбуждением требуется: 1. Рассчитать пусковой реостат и построить пусковые характеристики, если на валу
2. Определить
сопротивление, которое необходимо включать в цепь якоря, чтобы частота вращения
двигателя при номинальном моменте составляла 3. Рассчитать
сопротивление, которое следует включить в якорную цепь, чтобы при изменении
полярности питающего напряжения якоря ток его был равен 4. Рассчитать
дополнительное сопротивление, ограничивающее в режиме динамического торможения
пик тока до 5. Указать в чем недостатки реостатного регулирования, оценить его КПД. 2. Решение задачи По номинальным данным строим механическую характеристику:
Определяем моменты: а) пусковой (
б) Переключения
пусковых ступеней (
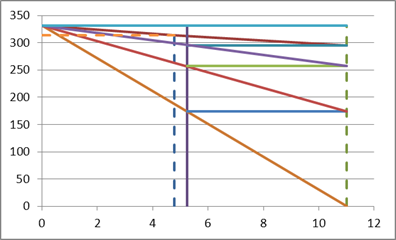
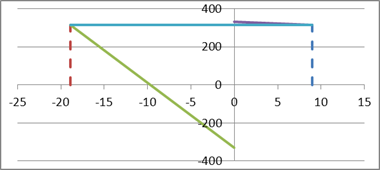
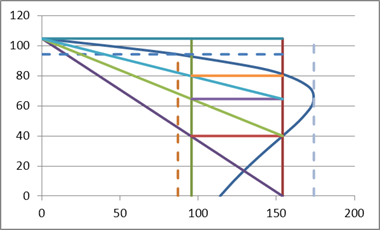
Полученные характеристики представлены на рисунке 2.
Рис.2. Технические характеристики двигателя Определяем пусковой резистор
Определяем пусковой резистор
Определяем пусковой резистор
Запишем уравнение механической характеристики с учетом требуемых значений параметров:
т.к.
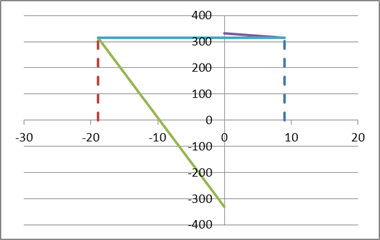
Запишем уравнение скоростной характеристики с учетом требуемых значений параметров:
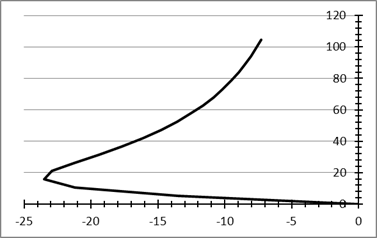
Рис. 3. Характеристика при смене питающего напряжения якоря, при токе Рассчитать дополнительное сопротивление, ограничивающее в режиме
динамического торможения пик тока до
Рис. 4. Характеристика двигателя в режиме динамического торможения При регулировании угловой скорости введением резисторов в цепь якоря, двигателя постоянного тока, потери мощности в этой цепи изменяются пропорционально перепаду угловой скорости. Если момент нагрузки постоянен, постоянна потребляемая мощность и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой из реостата, то есть данный способ регулирования является не экономичным. КПД привода при реостатном регулирование может быть определен по формуле:
По номинальным данным строим механическую характеристику:
Определяем моменты: а) пусковой (
б) Переключения пусковых ступеней (
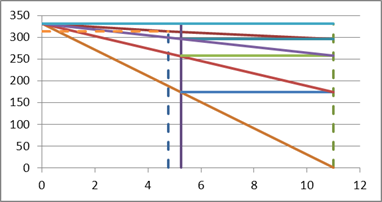
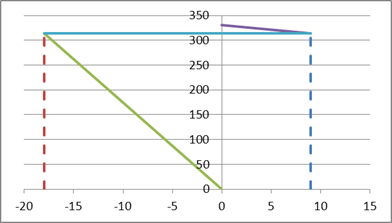
Полученные характеристики представлены на рисунке 2.1
Рис.2.1 Технические характеристики двигателя Определяем пусковой резистор
Определяем пусковой резистор
Определяем пусковой резистор
Запишем уравнение механической характеристики с учетом требуемых значений параметров:
т.к.
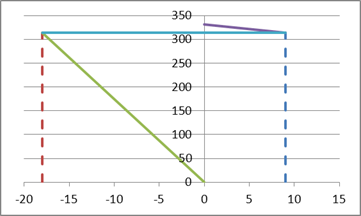
Запишем уравнение скоростной характеристики с учетом требуемых значений параметров:
Рис. 2.2. Характеристика при смене
питающего напряжения якоря, при токе Рассчитать
дополнительное сопротивление, ограничивающее в режиме динамического торможения
пик тока до
Рис. 2.3. Характеристика двигателя в режиме динамического торможения При регулировании угловой скорости введением резисторов в цепь якоря, двигателя постоянного тока, потери мощности в этой цепи изменяются пропорционально перепаду угловой скорости. Если момент нагрузки постоянен, постоянна потребляемая мощность и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой из реостата, то есть данный способ регулирования является не экономичным. КПД привода при реостатном регулирование может быть определен по формуле:
3. Исходные данные. Задача Таблица 1. Тип двигателя – МТН 211-6
Для асинхронного двигателя с фазным ротором требуется: 1. Построить естественную механическую характеристику. 2. Рассчитать
сопротивление пускового реостата и построить соответствующие характеристики,
если на валу 3. Построить
механическую характеристику в режиме динамического торможения при 4. Изложить перспективные методы регулирования скорости двигателей переменного тока. 4. Решение задачи Построить естественную механическую характеристику:
МКР = λ * МН=2*87,04=174,08 Нм
М1 = 0,885 * МКР, М1 = 0,885 * 174,009 = 154. М2 = 1,1 * МН, М2 = 1,1 * 87,005 = 95,7.
Рис. 4.1. Естественная и пусковые характеристики Рассчитать сопротивление пускового реостата и построить соответствующие характеристики, если на валу МС = МН. Определяем пусковой резистор RД1: RР = 0,466 Ом, аb = 24,67 мм, ас = 40,17 мм, R = RР * (ас/ab), R = 0,466 * (40,17/24,67) = 0,759 Ом, RД1 = R – RР, RД1 = 0,759 – 0,466 = 0,293 Ом. Определяем пусковой резистор RД2: аb = 24,67 мм, аd = 64,67 мм, R = RР * (аd/ab), R = 0,466 * (64,67 /24,67) = 1,22 Ом, RД2 = R – (RР + RД1), RД2 = 1,22 – (0,466 + 0,293) = 0,461 Ом. Определяем пусковой резистор RД3 : аb = 24,67 мм, ае = 104,67 мм, R = RР * (аe/ab), R = 0,466 * (104,67 /24,67) = 1,97 Ом, RД3 = R – (RР + RД1 + RД2 ), RД3 = 1,97 – (0,466 + 0,293 + 0,461 ) = 0,289 Ом. Пусковые характеристики представлены на рис.4.1. Построить механическую характеристику в режиме динамического торможения при IВ = 2IОН, RДОБ = 0,3RНОМ. Насыщение магнитной системы не учитывать. Определяем значение эквивалентного переменного тока: IЭКВ
= IЭКВ
= Определяем максимальный момент: МКР = МКР = Определяем критическое скольжение: SКР
= SКР
= М = Результаты расчетов сводим в таблицу 4.1 Таблица. 4.1
Рис.4.2 Механическая характеристика в режиме динамического торможения. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||