Курсовая работа: Расчет редуктора точного прибораКурсовая работа: Расчет редуктора точного прибораАннотация В курсовом проекте проведен расчет редуктора точного прибора, а именно, осуществлен выбор типа передач и вида зацепления, проведен расчет общего передаточного отношения редуктора, определение оптимального количества ступеней, распределение общего передаточного отношения по ступеням, исходя из условия минимальных габаритов редуктора; определение геометрических параметров колес (определение модуля зацепления, количества зубьев, диаметров окружностей выступов, впадин, диаметров основных окружностей, межосевых расстояний, ширины венца, высоты зуба); определены кинематические характеристики редуктора, осуществлен расчет самого нагруженного вала и выбор способа крепления деталей редуктора, подшипников; произведен расчет коэффициента полезного действия редуктора. Объем пояснительной записки к курсовому проекту (количество страниц): 31 страницы Содержание Введение 1. Библиографический поиск 2. Выбор типа передач и вида зацеплений 3. Разработка кинематической схемы 3.1 Определение общего передаточного отношения 3.2 Определение числа ступеней 4. Расчет кинематики и геометрии 4.1 Расчет кинематики редуктора 4.2 Геометрия 5. Разработка конструкции редуктора 5.1 Выбор конструкции цилиндрических зубчатых колес 5.2 Конструктивное выполнение и исполнение валов 5.3 Выбор и расчет опор 5.4 Определение КПД Заключение Список использованной литературы Введение ОБРАЗОВАНИЕ МЕХАНИЧЕСКОГО ПРИВОДА Приводом называют устройство, приводящее в движение машину или механизм. Он включает в себя обычно: источник энергии — двигатель, передаточный механизм на основе механических передач, согласующий скорости и моменты двигателя и рабочего органа машины (механизма), и аппаратуру управления. Лишь в редких случаях, когда угловые скорости валов двигателя и машины совпадают, применяют непосредственное их соединение муфтой (например, в приводах вентиляторов, насосов и т. п.). Выбор типа механической передачи для привода является одной из инженерных задач, решаемых при разработке проекта машины, прибора или аппарата на основе технико-экономического сопоставления. Исходными данными для этого служат внешние характеристики передачи: тип машины и назначение передачи; передаваемая мощность и частоты вращения входного и выходного валов, взаимное расположение и расстояние между этими валами; условия технического обслуживания, ресурс привода и др. Варианты передач сравнивают по КПД, массе, габаритам, стоимости проектирования, производства, эксплуатации и т. п. На принимаемые решения существенное влияние оказывают накопленный в машиностроении опыт проектирования, производства и эксплуатации различных передач, техническая оснащенность промышленных предприятий отрасли и другие факторы. РЕДУКТОРЫ В качестве передаточного механизма привода наиболее часто используют редуктор. Редуктором называют агрегат с передачами зацепления, который предназначен для повышения вращающего момента и уменьшения угловой скорости приводного двигателя. Редукторы широко применяют в различных отраслях машиностроения, т. е. имеют общемашиностроительное применение, благодаря удовлетворению общим техническим требованиям (экономическим, потребительским и т. п.)
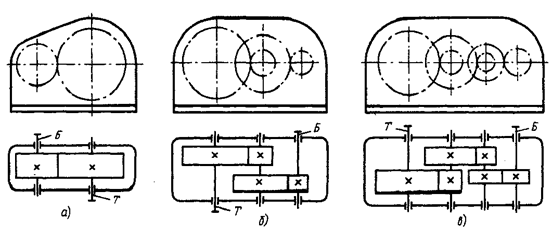
Внешние (потребительские) характеристики редукторов каждого типа определяются следующими основными параметрами: передаточным отношением (частотой вращения выходного вала) — кинематической характеристикой редуктора; вращающим моментом и допускаемой консольной нагрузкой на выходном валу — силовыми характеристиками редуктора; коэффициентом полезного действия. Редукторы общемашиностроительного применения в приводах комплектуются преимущественно четырехполюсными электродвигателями. Для обеспечения потребностей народного хозяйства промышленность выпускает редукторы и мотор-редукторы в широком диапазоне передаточных отношений от imin= 1 (для одноступенчатых конических и цилиндрических редукторов) до imax = 3150 (для мотор-редукторов, планетарных и некоторых других типов редукторов). Большинство отечественных и зарубежных редукторов выполняют с передаточными отношениями i≤ 160. Около 75% редукторов изготавливается в двухступенчатом исполнении при i = 8...40. Зубчатые редукторы выпускают серийно в одно-, двух- и трехступенчатом исполнении. Ряд одноступенчатых редукторов цилиндрических (т. е. с цилиндрическими колесами) типа ЦУ обеспечивает передачу вращающих моментов на тихоходном валу от 250 до 4000 Н-м при i = 2...6,3. Ряд двухступенчатых редукторов цилиндрических типа Ц2У в диапазоне i = 8...40 способен также передать вращающий момент Гт = = 250...4000 Н•м. В редукторах этого типа использовано зубчатое эвольвентное косозубое зацепление. Промышленность выпускает также подобные редукторы Ц2У-Н и Ц2Н с зацеплением Новикова и др. Распространены соосные редукторы, которые имеют меньшие габариты по длине. Для уменьшения условий работы наиболее нагруженной тихоходной ступени изготовляют редукторы с раздвоенной быстроходной ступенью в виде двух косозубых пар для обеспечения равномерного распределения нагрузки между ними. Колеса одной пары имеют левые зубья, а колеса другой пары — правые зубья. Один из валов раздвоенной передачи должен допускать осевую само-установку. Редукторы с раздвоенной ступенью имеют на 20 % меньшую массу, чем редукторы с развернутой схемой колес, но более трудоемки в изготовлении. Трехступенчатые редукторы типа ЦЗУ и др. имеют развернутую схему расположения колес. Используются также трехступенчатые редукторы с раздвоенной второй ступенью. Для передачи вращения между пересекающимися валами применяют коническо-цилиндрические редукторы типа КЦ1. Быстроходная ступень — коническая с круговыми зубьями, так как конические колеса больших размеров труднее изготовить, чем цилиндрические колеса. Тихоходная ступень косозубая. Менее распространены другие схемы редукторов. Промышленность серийно выпускает мотор-редукторы — агрегаты, в которых конструктивно объединены электродвигатель и редуктор: мотор-редукторы цилиндрические двухступенчатые соосные типа МЦ2С, мотор-редукторы планетарные зубчатые двухступенчатые типа МПз2 и мотор-редукторы волновые горизонтальные типа МВз. Получили распространение навесные редукторы и мотор-редукторы. Их выходной вал выполняется полым со шлицевым отверстием или канавкой под шпонку. Такой вал соединяется непосредственно с входным валом приводимой машины. 1. Библиографический поиск Для выполнения курсового проекта был проведен поиск зубчатых передач. В книги «Прикладная механика» авторов Г.Б. Иосилевич, Г.Б. Строганов был проведен анализ передач. 2. Выбор типа передач и вида зацеплений ФРИКЦИОННЫЕ ПЕРЕДАЧИФрикционной передачей называют механизм, в котором движение одного жесткого звена преобразуется в движение другого жесткого звена за счет сил трения в одной или нескольких зонах контакта (сопряжения). Необходимая сила трения между звеньями механизма создается прижатием одного из них к другому, т. е. силовым замыканием. Такие механизмы применяют преимущественно для преобразования параметров вращательного движения. Простейшая передача включает в себя ведущий и ведомый катки, две опоры, одна из которых может смещаться для создания начального прижатия катков. Достоинства передач состоят в простоте конструкции, плавности движения и бесшумности, удобстве регулирования частоты вращения ведомого звена. Недостатки передач связаны со сравнительно большими нагрузками на опоры, взаимным проскальзыванием катков. Звенья передач могут иметь не только цилиндрическую форму, но и коническую, сферическую и др. В приборах (например, лентопротягивающие устройства и т. п.), транспортных машинах и других используют механизмы, преобразующие вращательное движение ведущего катка в поступательное движение ведомого звена. Прижатие к ведущему ведомого звена может осуществляться силой тяжести последнего или, например, с помощью катка, вращающегося за счет сил трения. Прижатие катков является необходимым условием работы передач. Его осуществляют на практике либо постоянной, либо переменной силой, зависящей от внешней нагрузки. Постоянное прижатие получают за счет предварительной деформации при сборке упругих элементов системы (например, катков, специальных пружин и др.), использованием сил тяжести и т. д. Регулируемое прижатие требует применения специальных нажимных устройств (винтовых, шариковых и др.). Фрикционные вариаторы отличаются конструктивным разнообразием. Распространены вариаторы: конусные, многодисковые, шаровые, торовые и др. Фрикционные передачи применяют в кинематических цепях приборов для обеспечения плавности движения, бесшумности и безударного включения. Фрикционныё вариаторы применяют достаточно широко для обеспечения бесступенчатого регулирования скорости в станкостроении, текстильных, бумагоделательных и других машинах и приборах. Диапазон передаваемых мощностей обычно находится в пределах до 10кВт, так как при больших мощностях трудно обеспечить необходимое усилие прижатия катков. РЕМЕННЫЕ ПЕРЕДАЧИ Ременная передача также является фрикционным механизмом и предназначена для передачи вращательного движения на большие расстояния с преобразованием параметров вращения. Она состоит из двух шкивов, связанных между собой ремнем и натяжного устройства, создающего контактные давления между ремнем и шкивами и обеспечивающего таким образом передачу движения за счет сил трения. Передачи могут не иметь специального натяжного устройства. В этом случае начальное натяжение ремню дают при монтаже передачи. По форме сечения ремня различают плоско, кругло- и клиноременные передачи. С помощью ремня обычно передают движение между параллельными валами, вращающимися в одну сторону. Однако благодаря закручиванию ремня иногда реализуется передача между параллельными валами с вращением их в противоположные стороны, а также передача между перекрещивающимися валами. К достоинствам передач относятся: возможность передачи движения на большие расстояния (на 8...10 м и более), простота конструкции, сравнительно малая стоимость, быстроходность, плавность и бесшумность работы, малая чувствительность к перегрузкам, толчкам и ударам. Недостатки передач обусловлены невысокой долговечностью ремня (ремней), большими радиальными габаритами, значительными нагрузками на валы и опоры, непостоянством передаточного отношения. В механических приводах ременную передачу используют преимущественно как понижающую. Передаваемая мощность — до 50 кВт, окружная скорость до 40,н50 м/с, максимальное передаточное отношение i = 5...6 —для передачи без натяжного ролика и i = 6...10 — для передачи с натяжным роликом; допускают кратковременную перегрузку до 300 %. В многоступенчатых приводах ременную передачу применяют обычно в качестве быстроходной ступени, устанавливая ведущий шкив на валу двигателя. В таком случае габариты и масса передачи будут наименьшими. Опыт эксплуатации передач в различных машинах и механизмах показал, что работоспособность передач ограничивается преимущественно тяговой способностью и долговечностью ремня. В первом случае ремень имеет ограниченную тяговую способность из-за буксования, обусловленного недостаточной прочностью сцепления ремня со шкивом. При буксовании ремень нагревается и может сойти со шкива, обгореть (расплавиться). Поэтому буксование в ременной передаче недопустимо (в отличие от упругого скольжения). Во втором случае усталостное разрушение ремня является причиной отказа передачи. ЗУБЧАТО-РЕМЕННЫЕ ПЕРЕДАЧИ Зубчато-ременной называют передачу зацеплением с помощью зубчатого ремня. Как и обычная передача, она состоит из двух шкивов (звездочек), сопряженных с ремнем. Тяговое усилие ремня создается за счет контактных напряжений (давлений) между зубьями ремня и шкива, т. е. путем геометрического замыкания — зацепления. Небольшое начальное натяжение ремня осуществляют при монтаже передачи или натяжными роликами (цилиндрическими, зубчатыми). Линия осей центров зубчато-ременной передачи может располагаться в плоскости вращения звездочек горизонтально, наклонно и вертикально. Передачи допускают привод от одной ведущей звездочки к нескольким ведомым. Зубчатые ремни, совмещающие в себе свойства плоских ремней и цепей, получили в последнее время широкое распространение и применяются преимущественно в приводах мощностью до 500 кВт, при частотах вращения до 18000 мин-1 и передаточных отношениях до 12. Передачи зубчатыми ремнями имеют ряд важных достоинств: отсутствие проскальзывания; большой диапазон скоростей ремня (до 80 м/с); высокий КПД (95...99%); малошумность, что объясняется, в частности, малым люфтом в зацеплении; компактность благодаря небольшой ширине ремня и возможности применения звездочек малого диаметра; малая масса, отнесенная к единице мощности; простота обслуживания; малое требуемое натяжение и, как следствие, низкие нагрузки на опоры; большая долговечность, так как износ ремня мал. Ремни. Зубчатый ремень представляет собой бесконечную плоскую ленту с зубцами трапециевидной формы с внутренней стороны, а иногда и снаружи. Ремни выполняют в основном из армированного металлотросом неопрена или реже полиуретана. Спирально навитый по длине ремня трос служит несущим элементом при передаче окружного усилия и обеспечивает неизменяемость шага ремня. Предел прочности проволоки троса σВ = 3000 МПа, относительное удлинение δ = 4...5 %. Каркас кинематических зубчатых ремней (применяются в контрольной и измерительной аппаратуре) изготовляют из стекловолокна или полиамидного шнура, а ремень — из резины, покрытой для повышения износостойкости тканым нейлоном. Основным параметром ремня является модуль m=p/π, представляющий собой нормированный шаг p зубьев. Значения модуля выбирают по стандарту в зависимости от передаваемой мощности и частоты вращения быстроходного вала. При n1 = 650...3500 мин-1 Р, кВт 0.05...0,18 0,27...1,5 2,2...5,5 7,0...17 т, мм 2; 3 3; 4 4; 5 5; 7 Ширина ремня b также выбирается в зависимости от модуля. Расчетная длина ремня
Шкивы. Шкивы небольших диаметров выполняют сплошными, а шкивы больших диаметров - дисковой конструкции. Изготовляют шкивы из чугунов, сталей, легких сплавов, пластмасс (в зависимости от окружной скорости). Для предупреждения сбегания ремня меньший шкив снабжают двумя или одной ребордами. При передаточном отношении i >3 оба шкива выполняют с ребордами. Размеры шкива зависят от модуля и числа зубьев. Число зубьев меньшего шкива принимают в пределах z1 = 12...28 в зависимости от частоты вращения и модуля, число зубьев большего шкива z2 = iz1. Диаметры делительных окружностей шкивов d1=mz1 , d2=mz2; наружные диаметры шкивов зубчатых ремней da1=mz1 +2∆; da2=mz2-2∆, где ∆ = 0,6 мм при диаметре троса 0,36 мм и ∆=1,3 при диаметре троса 0,65 мм; диаметры окружностей впадин df1=da1 –1,8m; df2=da2 –1,8m; ширина шкива В = b+m; угол впадины 2β = (50 + 2)° при m=2 мм и 2β = (40+2)° при m >2 мм. Шаг зубьев на наружном диаметре
ЗУБЧАТЫЕ ПЕРЕДАЧИ Зубчатыми называют механизмы (передачи), в которых движение между звеньями (зубчатыми колесами) передается с помощью последовательно зацепляющихся зубьев. Их используют в большинстве машин и приборов для передачи и преобразования движения в широком диапазоне мощностей (до 150 тыс. кВт) и скоростей (до 200 м/с). Передачи имеют высокие технико-экономические показатели: высокую надежность работы и КПД (до 0,97...0,98 для одной пары колес ступени); простоту технического обслуживания и компактность (малую массу). Недостатки передач обусловлены сравнительно высокой трудоемкостью изготовления колес, возможностью появления шума в процессе работы и т. д. Процесс передачи движения с помощью зубьев принято называть зубчатым зацеплением. У зубчатого колеса условно различают тело и зубчатый венец, отделяемый от тела соосной поверхности впадин (соосной называют поверхность вращения, ось которой совпадает с осью колеса). Линия пересечения боковой поверхности зуба с какой-либо заданной поверхностью (например, плоскостью, перпендикулярной оси колеса, и т. п.) называется профилем зуба. Колесо, радиус которого равен бесконечности, называют зубчатой рейкой. Передачи классифицируют по геометрическим и функциональным особенностям. По взаимному расположению осей: цилиндрические (имеют параллельные оси); конические (оси колес пересекаются); гиперболоидные (передачи со скрещивающимися осями; червячные; винтовые; гипоидные и др.). По относительному расположению поверхностей вершин и впадин зубьев колес: передачи внешнего зацепления (образуются при зацеплении колес с внешними зубьями) и передачи внутреннего зацепления (образуются при зацеплении колес, одно из которых имеет внутренние зубья, а другое — внешние зубья). У колеса с внешними зубьями поверхность вершин находится вне впадин, а у колеса с внутренними зубьями — внутри поверхности впадин. По характеру движения осей: обычные передачи, имеют неподвижные геометрические оси всех колес; планетарные передачи, оси одного или нескольких колес подвижны. По направлению (расположению образующей линии) зубьев: передачи с прямыми (прямозубые) и криволинейными зубьями. Колеса прямозубых передач имеют прямые линии зубьев. Косые зубья — разновидность винтовых зубьев. По профилям зубьев колес передачи подразделяют на: передачи с эвольвентным зацеплением, в котором профили зубьев очерчены эвольвентами окружностей; передачи с циклоидальным зацеплением, в котором профили зубьев — дуги эпи- и гипоциклоид; передачи с зацеплением Новикова, в котором взаимодействуют выпуклый профиль зуба одного колеса и вогнутый профиль зуба другого колеса. В зависимости от назначения зубчатые передачи могут встраиваться в конструкцию машины (встроенные передачи) или выделяться в самостоятельный узел (агрегат) и иметь отдельный корпус. По конструктивному исполнению передачи могут располагаться вне корпуса и иметь легкое ограждение — открытые передачи, либо работать в корпусе, изолирующем их от внешней среды — закрытые передачи. Открытые передачи работают без смазывания или при ограниченном смазывании при небольших окружных скоростях (тихоходные передачи). Закрытыми выполняют передачи, работающие при средних и высоких окружных скоростях (быстроходные передачи) с обильным смазыванием (из масляной ванны, струей масла и др.) Различают силовые и не силовые (кинематические) передачи. Силовые передачи используют для передачи мощностей. Их габариты определяются, как правило, прочностной надежностью. Не силовые передачи выполняют в основном кинематические функции и мощности практически не передают. Размеры таких передач определяются конструктивными соображениями. Зубчатые передачи могут понижать или повышать частоту вращения ведомого вала. В понижающей передаче частота вращения ведомого вала (колеса) меньше (а в повышающей передаче — больше) частоты вращения ведущего вала (колеса). Агрегат с понижающей передачей (передачами) называют редуктором, агрегат с повышающей передачей называют мультипликатором. Эвольвентное зацепление
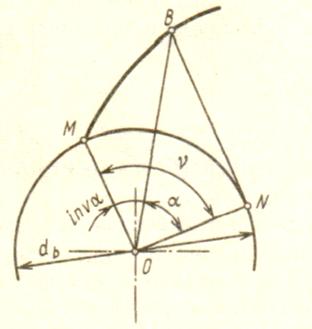
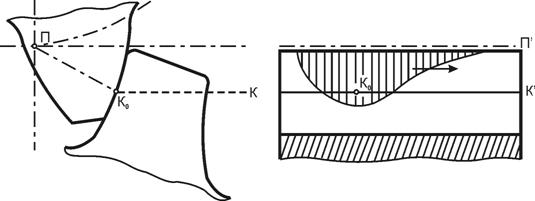
Основные сведения. Эвольвентой (от лат. слова еvоlvеns) называют плоскую кривую, являющуюся разверткой другой плоской кривой, называемой эволютой. Для образования зубьев колес в качестве эволюты используют окружность, называемую основной (db — диаметр основной окружности). Эвольвенту этой окружности будет описывать любая точка прямой линии (производящей прямой), перекатываемой по ней без скольжения. Предельная точка М эвольвенты лежит на основной окружности. Используя известные из дифференциальной геометрии соотношения для определения центра кривизны кривой, несложно показать, что точка N прямой NB будет центром кривизны эвольвенты (мгновенным центром вращения), а отрезок NB — радиусом кривизны эвольвенты в точке В. Углы развернутости v, профиля α и эвольвентный inv α (инволюта а), образуемые радиальными прямыми ОМ, 0В и ОN , связаны между собой зависимостью inv α = V - α Так как дуга МN равна отрезку ВN, перекатываемому по дуге без скольжения, то (МN = rb V) inv α = tg α – α Если учесть (r — радиус-вектор произвольной точки эвольвенты), что cos α =rb/r , то становится очевидным, что радиус rb основной окружности является единственным параметром, определяющим эвольвенты. ПЕРЕДАЧИ С ЗАЦЕПЛЕНИЕМ НОВИКОВА М. Л. Новиковым разработано зубчатое зацепление цилиндрических колес, в котором выпуклые поверхности начальных головок зубьев одного колеса взаимодействуют с вогнутыми поверхностями начальных ножек зубьев другого колеса. Благодаря повышенной нагрузочной способности передачи с зацеплением Новикова применяются в редукторах и приводах машин в нашей стране и за рубежом. В отличие от эвольвентных передач начальный контакт криволинейных поверхностей зубьев осуществляется лишь в одной точке K0 на одной линии зацепления КК', расположенной параллельно осям вращения колес, и полюсной линии ПП'. Линия зацепления проецируется на торцовую плоскость в точку К0, поля зацепления в этих передачах не существует. Так как начальный контакт зубьев осуществляется в одной точке (εα =0), то для обеспечения непрерывности зацепления передачи Новикова выполняются обязательно косозубыми (β=8..22°) с коэффициентом осевого перекрытия εβ>1. Другое существенное отличие передачи Новикова от эвольвентной передачи состоит в том, что перекатывание зубьев в процессе зацепления происходит не по высоте, а по их длине (перемещение точки Ко показано стрелкой) и скорость перемещения точки начального контакта значительно (в 4...10 раз) больше ее окружной скорости. Последнее способствует образованию в контакте толстого гидродинамического масляного слоя, снижению потерь на трение и уменьшению износа. Однако в действительности из-за упругой контактной деформации зубьев под нагрузкой их взаимодействие происходит через площадку, размеры которой быстро увеличиваются в результате приработки (заштрихована на рис.а). Поэтому передача Новикова имеет высокую контактную прочность (в 1,5 раза больше эвольвентной передачи при твердости зубьев менее 350 НВ и окружной скорости V<12 м/с).
а)
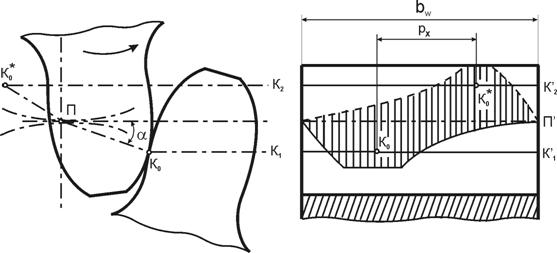
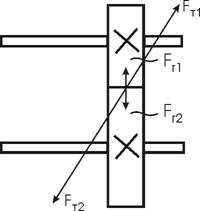
б) В редукторах получили распространение передачи Новикова, у которых головки зубьев обоих колес выпуклые, а ножки — вогнутые. Такие передачи имеют две линии зацепления К1 К'1, и К2 К'2, расположенные параллельно осям вращения зубчатых колес и полюсной линии ПП' (одна линия зацепления расположена над, а другая — под полюсной линией). Здесь имеются две точки зацепления K0 и K*0, расположенные на одной или двух соседних парах зубьев, и под нагрузкой образуются две развивающиеся со временем площадки контакта (заштрихованы на рис.б). Передачи Новикова с двумя линиями зацепления имеют контактную прочность в 1,7 раза выше, чем аналогичные эвольвентные передачи, но чувствительны к погрешностям межосевого расстояния. Формулы для определения основных размеров передачи Новикова и эвольвентных передач одинаковые. ГИПЕРБОЛОИДНЫЕ ПЕРЕДАЧИ Гиперболоидными называют передачи со скрещивающимися осями, у которых аксоидные поверхности зубчатых колес имеют форму однополостных гиперболоидов вращения. Гиперболоидные механизмы используют для передачи вращательного движения между скрещивающимися осями и преобразования параметров движения. В механизмах наиболее часто применяют три разновидности передач: червячную, винтовую и гипоидную. Перекрестное расположение осей дает передачам ряд важных для практики преимуществ перед другими передачами: валы могут продолжаться в обе стороны от колеса, облегчая передачу движения нескольким ведомым валам; подшипники можно располагать по обе стороны от колеса, улучшая (в сравнении с коническими передачами) условия работы передачи. Винтовые механизмы используют для передачи малых мощностей (например, кинематических цепях приборов и т. д.) благодаря бесшумному зацеплению колес, скрещивающихся под любым углом. Начальной поверхностью передач является средняя часть гиперболоида. Для упрощения изготовления колес гиперболоиды заменяют цилиндрами. Такая замена начальных поверхностей делает первоначальный контакт (в ненагруженном состоянии) точечным, а колеса — косозубыми цилиндрическими. Геометрический расчет винтовых передач производится так же, как и расчет косозубых передач. В отличие от косозубых эвольвентных передач углы β1 и β2 наклона зубьев могут быть неодинаковыми; в ортогональной винтовой передаче β1+ β2 = 900. Заданное передаточное отношение можно обеспечить изменением диаметров колес и углов наклона зубьев. В гипоидных передачах начальной поверхностью является расширяющаяся часть гиперболоида. Для упрощения изготовления колес этих передач гиперболоиды заменяют усеченными конусами. В результате передача вращения осуществляется коническими колесами с прямыми или криволинейными зубьями. Но вершины конусов колес не пересекаются, они скрещиваются обычно под углом 90°. Начальный контакт прямозубых колес точечный; колеса с криволинейными зубьями могут иметь контакт по линии. Работа винтовых и гипоидных передач характеризуется точечным контактом зубьев и их большим взаимным скольжением (особенно в винтовых передачах), вследствие чего ухудшаются условия смазывания, возникает повышенный износ и часто наступает заедание (особенно в гипоидных передачах). Для увеличения износостойкости зубьев винтовых передач их колеса изготовляют из материалов с хорошими антифрикционными свойствами. Обычно пары колес составляют из материалов: сталь — бронза, сталь — чугун, сталь — текстолит и др. Для предотвращения заедания гипоидные колеса изготовляют из сталей с высокой твердостью поверхности, применяют также противозадирные смазочные материалы (гипоидное масло и др.). Червячную передачу образуют два колеса: ведущее колесо (червяк) выполнено с малым числом зубьев z1 = 1...4, а ведомое (червячное) колесо имеет большое число зубьев z2≥ 28. Угол скрещивания осей обычно составляет 90°. По форме делительной поверхности различают червяки: цилиндрические и глобоидные. Цилиндрические червяки (ГОСТ 18498—73) могут иметь в осевом сечении трапецеидальный или выпуклый профиль, а в торцовом сечении архимедову спираль (архимедов червяк), удлиненную (реже укороченную) эвольвенту; конволютный червяк) и эвольвенту (эвольвентный червяк). Их нагрузочная способность приблизительно одинаковая. Архимедов червяк может быть нарезан на обычных токарных и резьбофрезерных станках (не требует специальных станков), однако шлифование (доводка после термообработки) его затруднено. Поэтому архимедовы червяки применяют в передачах, если твердость червяка в пределах до 350НВ приемлема (в открытых и малонагруженных закрытых передачах). Эвольвентные червяки используют в высоконагруженных передачах, в которых требуется высокая твердость (свыше 45НRС) и допускается малая высота микронеровностей. Червячные передачи обладают рядом достоинств: возможностью получения больших передаточных отношений в одной ступени (обычно i=10...60, реже i= 60...100), плавностью и бесшумностью работы, самоторможением. Однако червячные передачи имеют сравнительно низкий КПД, обусловленный большим скольжением и тепловыделением, часто требуют для отвода теплоты применения специальных устройств (обдув, оребрение корпуса и др.). Указанные обстоятельства ограничивают области использования червячных передач. Ниже рассматриваются лишь червячные передачи, так как среди гиперболоидных передач они наиболее широко используются в технике. ЦЕПНЫЕ ПЕРЕДАЧИ Цепной называют передачу зацеплением с помощью цепи. Их используют в приводах для передачи на большое расстояние вращательного движения (между параллельными осями) с преобразованием его параметров. Простейшая передача включает в себя две звездочки, соединенные приводной цепью. Одна из звездочек будет ведущей, другая — ведомой. Линия центров передачи может быть не только горизонтальной, но и наклоненной к горизонту под углом γ≤80°. Применяют также передачи с приводом нескольких ведомых звездочек от одной ведущей. Цепные передачи используют в приводах роботов, сельскохозяйственных и транспортных машин, различных станков и т. п. в качестве быстроходной (скорость цепи Vц ≤ 25 м/с, передаточное отношение i≤З) или тихоходной (скорость цепи Vц<2 м/с, i=10...15) ступени. Среднескоростные передачи при Vц = 2...6 м/с допускают i≤6. Цепные передачи используют в качестве понижающих или повышающих. Передаваемая мощность обычно не превышает 100 кВт, межосевое расстояние до 6...8 м. Цепные передачи имеют высокий КПД (η = 0,96...0,98), меньшую, чем в ременной передаче, нагрузку на валы, в них исключено проскальзывание цепи. Недостатки передачи обусловлены шумом, неравномерностью хода «вытягиванием» цепей (увеличением шага цепей вследствие износа шарниров) и, как следствие, необходимостью применения натяжных устройств. ПЕРЕДАЧИ ВИНТ-ГАЙКА Передача винт — гайка представляет собой кинематическую винтовую пару, которую используют в различных машинах и приборах для преобразования с большой плавностью и точностью хода вращательного движения в поступательное. Механизмы часто применяют в качестве подъемных (домкраты и др.) и нагружающих устройств (прессы и др.), так как с их помощью можно сравнительно просто получать большие усилия (500...1000 кН) при малых перемещениях. Простейший механизм содержит два звена: стойку - неподвижную гайку и подвижное звено — винт, обладающее винтовым движением. Механизм используют на практике для создания силы. В механизмах оба звена, составляющих винтовую пару, подвижны. В первом из них вращение гайки вызывает поступательное перемещение винта, а во втором — вращение винта приводит к поступательному перемещению гайки. Эти две схемы передач распространены на практике, так как передача вращательного движения на гайку или винт не вызывает технических трудностей. Используют механизмы с резьбой различных профилей. В силовых механизмах большее распространение получила трапецеидальная резьба, в механизмах приборов — метрическая резьба, а в механизмах и устройствах прессов и прокатных станов - упорная резьба. Достоинства механизмов: простота конструкций, плавность и точность хода, большое передаточное отношение, а также возможность самоторможения. Однако их КПД сравнительно низкий. Ходовые винты изготовляют из высокоуглеродистых сталей 40, 45, 50, 40ХН, 50ХГ, 65Г и др. с закалкой до твердости более 50 НRС. Гайки изготовляют из оловянистых бронз Бр010Ф1, Бр06Ц6С3 и др. при высоких скоростях вращения (0,1...0,25 м/с), а при малых скоростях вращения используют антифрикционные чугуны марок АВЧ-1, АВЧ-2, АКЧ-1, АКЧ-2 или серые чугуны марок СЧ15, СЧ20. ВЫВОД: Наиболее применима и удобна зубчатая передача с эвольвентным зацеплением. На основании данного материала самой хорошей передачей является цилиндрическая с эвольвентным зацеплением. 3. Под кинематической схемой понимается изображение перечня элементов и изображение между ними 3.1 Определение общего придаточного отношения Uр=nвх/nвых, где nвх–число оборотов входного вала, nвых– число оборотов выходного вала Подставляя исходные данные получим: Uр=2052/38=54 3.2. Определение числа ступеней Для обеспечения минимальной массы оптимальное число ступеней: К=3lgUр Подставляя данные получим: К=3·lg 54 ≈ 5 Для определения ориентировочного передаточного отношения каждой ступени воспользуемся формулой: Uк= Uк= Для нормальной работы редуктора необходимо, чтобы передаточное отношение ступеней возрастало от входного вала к выходному. При этом числовое значение Uк должно лежать в пределах от 1/5 до 5. Ориентируясь на полученную цифру для первой ступени выбираем: U1=1,8, т.к.Uр = U1·U2·U3·U4·U5 U2,3,4,5 = Up/U1 = 54/1,8 = 30 U2 = 2 U3,4,5 = U2,3,4,5/U2 = 30/2 = 15 U3 = 2,2 U4,5 = U3,4,5/U3 = 15/2,2 =6,8 U4 = 2,4 U5 = U4,5/U4= 6,8/2,4 = 2,8 U1=1,8 U2 = 2 U3 = 2,2 U4 = 2,4 U5 = 2,8 3.3 Определение числа зубьев Минимальное число зубьев на шестерни для эвольвентного зацепления лежит в пределах от 17 до 28, причем в точных передачах надо приближаться к верхнему правому пределу. Ориентируясь на ГОСТ 13733-77 выбираю для первой шестерни Z1 = 24 Для обеспечения технологичности и экономичности редуктора рекомендуется все шестерни делать одинаково. Поэтому Z1 = Z3= Z5 = Z7= Z9= 24 Определим число зубьев шестерни Uк = Z2i/Z2i-1 U1 = Z2/Z1 Z2 = U1·Z1 = 1,8·24 ≈ 43 Z4 = U2·Z3 = 2·24 = 48 Z6 = U3·Z5 = 2,2·24 ≈ 53 Z8 = U4·Z7 = 2,4·25 ≈58 Z10 = U5·Z9 = 2,8·24 ≈ 67 Полученные результаты сведём в таблицу 1.
Определим общее передаточное отношение редуктора по ГОСТу Uрг = Z2·Z4·Z6·Z8·Z10/ Z1·Z3·Z5·Z7·Z9 Определим погрешность придаточного отношения:
т.е. число зубьев колёс выбрано правильно. С учетом полученных данных строим кинематическую схему редуктора. 4. Расчет кинематики и геометрии Основой для проведения расчетов является выбранный модуль и число зубьев колес. 4.1 Расчет кинематики редуктора Расчет ведем по следующим формулам: Uk= n2k-1/n2k= W2k-1/W2k Wk= Tihk/30 Mk+1= Mk·Uk M2= M1·U1= 25·10-4·1,8= 0,0045 M3= M2·U2= 0,0045·2= 0,009 M4= M3·U3= 0,009·2,2= 0,0198 M5= M4·U4= 0,0198·2,4= 0,04752 M6= M5·U5= 0,04752·2,8= 0,133056 n1=2052 n2= n1/U1= 2052/1,8= 1140 n3= n2/U2= 1140/2= 570 n4= n3/U3= 570/2,2= 259 n5= n4/U4= 259/2,4= 108 n6=n5/U5= 108/2,8= 38 Wk= Tihk/30≈0,1 W1= n1·Wk= 2052·0,1= 205,2 W2= n2·Wk= 1140·0,1= 114,0 W3= n3·Wk= 570·0,1= 57,0 W4= n4·Wk= 259·0,1= 25,9 W5= n5·Wk= 108·0,1= 10,8 W6= n6·Wk= 38·0,1= 3,8 Полученные данные занесем в таблицу 2
4.2 Геометрия Воспользуемся следующими формулами: d= mz – для делительной окружности De= d+2m – диаметр выступа Db= d-3m – диаметр впадины a= m(z1+z2+…)/2 – межцентровое расстояние, z1– шестерня, z2– колесо b= (3…15)m – ширина венца h= 2,5m – высота зуба Предварительно выбираем значение модуля по Госту 9563–60 m= 0,3 Определим делительные окружности: d1,3,5,7,9= mz1= 0,3·24= 7,2 d2= mz2= 0,3·43= 12,9 d4= mz4= 0,3·49= 14,7 d6= mz6= 0,3·54= 16,2 d8= mz8= 0,3·55= 16,5 d10= mz10= 0,3·68= 20,4 Определим диаметр выступа: De1,3,5,7,9= d1,3,5,7,9+2m= 7,2+0,6= 7,8 De2= d2+2m= 12,9+0,6= 13,5 De4= d4+2m= 14,7+0,6= 15,3 De6= d6+2m= 16,2+0,6= 16,8 De8= d8+2m= 16,5+0,6= 17,1 De10= d10+2m= 20,4+0,6= 21 Определим диаметр впадины: Db1,3,5,7,9= d1,3,5,7,9-3m= 7,2-0,9= 6,3 Db2= d2-3m= 12,9-0,9= 12,0 Db4= d4-3m= 14,7-0,9= 13,8 Db6= d6-3m= 16,2-0,9= 15,3 Db8= d8-3m= 16,5-0,9= 15,6 Db10= d10-3m= 20,4-0,9= 19,5 Определить межцентровое расстояние: a1= m(z1+z2)/2= 0,3(24+43)/2= 10,05 a2= m(z1+z2)/2= 0,3(24+49)/2= 10,95 a3= m(z1+z2)/2= 0,3(24+54)/2= 11,7 a4= m(z1+z2)/2= 0,3(24+55)/2= 11,85 a5= m(z1+z2)/2= 0,3(24+68)/2= 13,8 Определим ширину венца: b= (3…15)m= 10·0,3= 3 Определим высоту зуба: h= 2,5m= 2,5·0,3= 0,75 5. Разработка конструкций редуктора Разработка конструкции состоит в расчете и выборе его элементов: зубчатые колеса, валы, подшипники и корпуса. ОБЩАЯ ХАРАКТЕРИСТИКА ВАЛОВ И ОСЕЙ Назначение и классификация. Поддержания вращающихся деталей для передачи вращающего момента одной детали к другой (в осевом направлении) в конструкциях используют детали в форме тел вращения, называемые валами. В зависимости от вида испытываемой деформациусловно различают: простые валы (валы) — работают в условиях кручения, изгиба и растяжения (сжатия), их применяют в передачах: зубчатых, ременных и др.; торсионные валы (торсионы) — работают лишь в условиях кручения, т. е. передают только вращающий момент, соединяя обычно два вала на индивидуальных опорах; оси — поддерживающие невращающиеся валы, работающие лишь в условиях изгиба и реже растяжения (сжатия.). В зависимости от распределения нагрузок вдоль оси вала и условий сборки прямые валы выполняют гладкими или ступенчатыми, близкими по форме к балкам равного сопротивления изгибу. Гладкие валы более технологичны. В специальных машинах (поршневых двигателях и компрессорах) используют коленчатые валы, имеющие «ломаную» ось. Для передачи вращающего момента (вращения) между агрегатами со смещенными в пространстве осями входного и выходного валов применяют специальные гибкие валы, имеющие криволинейную геометрическую ось при работе. Такие валы обладают высокой жесткостью при кручении и малой жесткостью при изгибе. В зависимости от расположения, быстроходности и назначения валы называю входными, промежуточными, выходными, тихо - или быстроходными, распределительными и т. п. 5.1 Выбор конструкции цилиндрических зубчатых колес Конструкция определяется ГОСТом 13755-81 Для улучшения работоспособности
тяжелонагруженных и высокоскоростных цилиндрических зубчатых передач- внешнего
зацеплений рекомендуется применять исходный контур с модификацией профиля
головки зуба, при этом линия модификации — прямая, коэффициент высоты
модификации hg должен быть не более 0,45, а коэффициент глубины модификации Параметры модификации .профиля головки зуба исходного контура приведены в справочном приложении. Для передач, к которым предъявляются специальные требования, допускается применение исходных контуров, отличающихся от установленных настоящим стандартом, параметры которых должны устанавливаться в отраслевых стандартах. Допускается изготавливать зубчатые колеса винтовых передач в соответствии с исходным -контуром, установленным настоящим стандартом. Зубчатые колеса рекомендуется изготавливать без модификации профиля головки зуба, если в результате модификации головки величина части коэффициента торцевого перекрытия, определяемая участками главных профилен ε ам, скажется менее 1,1 у прямозубых передач. Зубчатые колеса передач внутреннего зацепления могут изготавливаться в соответствии с исходным контуром. При окончательной обработке боковых поверхностей зубьев зубообрабатывающим инструментом следует с практически возможным приближением обеспечивать параметры модификации и переходные кривые, при этом действительная высота модификации головки зуба должна быть не более номинальной. В технически обоснованных случаях, при массовом и крупносерийном производстве и для передач точнее 6-й степени точности рекомендуется изменение параметров модификации применительно к частным условиям работы передачи. 5.2 Конструктивное выполнение и использование валов dв [ dв1 dв2 dв3 dв4 dв5 dв6 5.3 Выбор и расчет опор ОПОРЫ ВАЛОВ И ОСЕЙ ОБЩАЯ ХАРАКТЕРИСТИКА ПОДШИПНИКОВ СКОЛЬЖЕНИЯ Общие сведения. Подшипник скольжения является парой вращения, он состоит из опорного участка вала (цапфы) и собственно подшипника котором. Их используют в качестве опор валов и осей механизмов и машин в тех случаях, когда применение подшипников качения затруднено или невозможно по ряду причин: высокие вибрационные и ударные нагрузки; низкие и особо высокие частоты вращения; работа в воде, агрессивных средах, а также при недостаточном смазывании или без смазывания; необходимость выполнения диаметрального разъема; отсутствие подшипников качения требуемых диаметров (миниатюрные и особо крупные валы) и др. Надежность работы подшипников в значительной мере определяет работоспособность и долговечность машин. Благодаря бесшумности и указанным выше достоинствам, а также по конструктивным и экономическим соображениям опоры скольжения находят широкое применение в паровых и газовых турбинах, двигателях внутреннего сгорания, центробежных насосах, центрифугах, металлообрабатывающих станках, прокатных станах, тяжелых редукторах и пр. По виду трения скольжения различают: подшипники сухого трения — работают на твердых смазочных материалах без смазочного материала; подшипники граничного (полужидкостного) трения; подшипники жидкостного трения подшипники с газовой смазкой. По виду воспринимаемой нагрузки и подшипники подразделяю на- радиальные — воспринимают радиальную нагрузку упорные — воспринимают осевые силы радиально-упорные — воспринимают радиальные и осевые нагрузки; обычно их функции выполняют упорные подшипники, совмещенные с радиальными. Цапфу, передающую радиальную нагрузку, называют шагом — при расположении ее в конце вала и шейкой — если она находится в середине вала. Цапфу, передающую осевую нагрузку, называют пятой, а подшипник подпятником. Форма рабочей поверхности подшипников и цапф может быть цилиндрической, конической и шаровой. Конические и шаровые подшипники применяются редко. Самое главное требование- малое трение При выборе шарикоподшипников исходят из усилия, возникающие при зацеплении зубчатых колес. При выборе шарикоподшипников исходят из усилий, возникающих при зацеплении зубчатых колес. Для цилиндрической передачи это усилие:
где Радиальная сила направлена к центру зубчатого колеса. Подшипники выбираются в зависимости от действующих нагрузок, так как здесь действует радиальная сила. Выбор ведется по внутреннему диаметру подшипника ГОСТ 8338 – 75: получаем, что первому валу соответствует подшипник 1000091, второму валу – 1000091/1,5, третьему – 1000092, четвертому – 1000093. Правильность выбора подшипника определяется по его динамической грузоподъемности. Для этого используется следующая формула:
где С - динамическая грузоподъемность, n – число оборотов, Р – эквивалентная динамическая нагрузка. А Р, в свою очередь, вычисляется по формуле:
где Х – коэффициент нагрузки, V – коэффициент вращения, Кб – коэффициент безопасности, КТ – температурный коэффициент. Для прямозубых цилиндрических передач: Х = V = Кб = КТ =1,
Вычислим окружное усилие, радиальное усилие, грузоподъемность и результаты запишем в таблицу 3
Ft= 2Mкр/d – окружное усилие Ft1= 2*0,0025/0,001= 5 Ft2 2*0,0045/0,001= 9 Ft3 2*0,009/0,0015= 12 Ft4 2*0,0198/0,002= 19,8 Ft5 2*0,04752/0,0025= 38,016 Ft6 2*0,133056/0,003= 88,704 F F F F F F F Для прямозубых цилиндрических передач: X=V= Kб= Kt=1 C=F L=104 час C C1=1,82 C2=3,28 C3=4,37 C4=7,21 C5=13,84 C6=32,29 5.4 Определение КПД ηр=η1·η2·η3·η4·η5 ηi=1-cπf(1/z1+1/z2)*1/2 f=0,15 c= (F c1=(1,82+2,87)/(1,82+0,17)= 2,36 c2=(3,28+2,87)/(3,28+0,17)=1,78 c3=(4,37+2,87)/(4,37+0,17)=1,59 c4=(7,21+2,87)/(7,21+0,17)=1,37 c5=(13,84+2,87)/(13,84+0,17)=1,19 η1=1-1,82*3,14*0,15(1/24+1/43)*1/2= 0,96 η2=1-1,78*3,14*0,15(1/24+1/49)*1/2= 0,97 η3=1-1,59*3,14*0,15(1/24+1/54)*1/2= 0,97 η4=1-1,37*3,14*0,15(1/24+1/55)*1/2= 0,98 η5=1-1,19*3,14*0,15(1/24+1/68)*1/2= 0,98 ηр=η1·η2·η3·η4·η5 ηр=0,96·0,97·0,97·0,98·0,98= 0,87=87% Заключение При проектировании редуктора находят практические приложения такие важнейшие сведения из курса, как расчеты на контактную и объемную прочность, тепловые расчеты, выбор материалов и термообработок, масел, посадок, параметров шероховатости поверхности и т. д. При выборе типов передач, вида зацепления, механических характеристик материалов надо учитывать, что затраты на материалы составляют значительную часть стоимости машин: в редукторах общего назначения -85 %, в дорожных машинах — 75 %, в автомобилях — 70 % и т. д. Таким образом, изыскание путей снижения массы проектируемых объектов является важнейшей предпосылкой дальнейшего прогресса, необходимым условием сбережения природных ресурсов. Уместно отметить, что большая часть вырабатываемой в настоящее время энергии проходит через механические передачи, поэтому их КПД в известной степени определяет эксплуатационные расходы. Наиболее полно требованиям снижения массы и габаритных размеров удовлетворяет привод с использованием планетарных передач. Этому виду передач посвящено большое внимание. Список используемой литературы: 1. “Прикладная механика” авторы: Г.Б.Иосилевич, Г.Б.Строганов 2. П.Д.Дунаев, О.П.Леликов ”Конструирование узлов и деталей машин” 3. В.Н.Кудрявцева ”Курсовое проектирование деталей машин” |
 - окружное усилие
- окружное усилие - долговечность в часах
- долговечность в часах - грузоподъемность,
- грузоподъемность,