Курсовая работа: Теория механизмов и машинКурсовая работа: Теория механизмов и машин1 Структурный и кинематический анализ главного механизмаВыходные данные согласно заданию к курсовому проекту. 1. Схема двухпоршневого V - образного насоса (рис. 1.1) 2. Угловая скорость кривошипа 3. Погонная единица массы 4. Коэффициент 5. Коэффициент 6. Угол 7. Длина кривошипа 8. Длина шатуна 9. Неравномерность хода
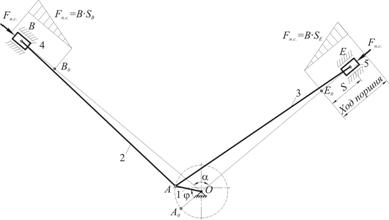
Рис. 1.1. Кинематическая схема механизма 1.1 Структурный анализ механизмаМеханизм двухпоршневого горизонтального насоса состоит из 6 звеньев: 1 – кривошип ОА; 2, 3 – шатуны АB и AE; 4, 5 – ползуны (поршни) B и E; 6 – стойка. Звенья механизма образуют 7 кинематических пар, из которых 5 вращательных и 2 поступательные. Согласно формуле Чебышева степень свободы определиться как
где
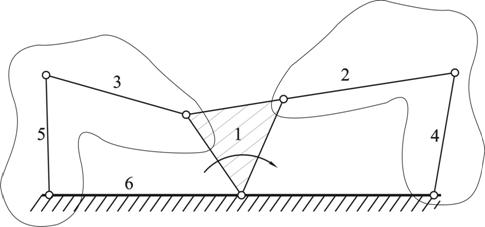
Таким образом, механизм имеет одну степень свободы. На рис. 1 изображена структурная схема механизма с разбиением на группы Асура и начальный механизм. Структурная схема наглядно показывает, что механизм состоит из начального механизма 1 класса (стойка 6 и кривошип 1) и двух групп Асура (шатун 2 и ползун 4, шатун 3 и ползун 5).
Рис. 1.2 Структурная схема механизма Структурная формула механизма:
Механизм относится к механизмам II класса по классификации И. И. Артоболевского. 1.2 Построение плана положений механизмаНа листе формата А1 изображаем в масштабе план положений механизма. План строим в такой последовательности. Выбираем масштаб построения:
Выбираем произвольную точку О и из нее описываем окружность радиуса ОА. Начальное положение точки А (АО) выбираем согласно исходной схемы на продолжении направляющей ОE, при пересечении ее с вычерченной окружностью. От точки АО в направлении вращения кривошипа ОА разбиваем окружность на 12 равных частей, через каждые 30 градусов, проставляя при этом последовательно точки А1, А2 и т. д. Соединив полученные точки с центром окружности О, получим 12 положений кривошипа ОА. Точка E принадлежит шатуну АE и ползуну E и движется поступательно по направляющей ОE, поэтому для построения плана положений звена АE из каждой точки А раствором циркуля, равным длине шатуна АE в принятом масштабе, делаем засечки на направляющей, получая точки E1, E2 и т. д. План положений для звена AB строим аналогично. 1.3 Построение планов скоростейПаны скоростей строятся по векторным уравнениям, которые составляются отдельно для каждой группы Асура в порядке присоединения их к ведущему звену. Для ведущего звена ОА определяем величину скорости точки А:
Вектор
и вычисляем отрезок
Из произвольной точки Р, называемой полюсом плана скоростей,
откладываем в указанном направлении отрезок Составляем векторное уравнение, по которому определим скорость точки B, принадлежащей шатуну АB и ползуну B.
Скорость точки А известна, скорость относительного вращения точки B вокруг точки А перпендикулярна радиусу вращения отрезку АB и определяется по формуле
Скорость точки B направлена вдоль направляющей АB. Таким образом, получаем векторное уравнение, в
котором два вектора известны по направлению, но неизвестны по величине, а
третий вектор известен по направлению и по величине. Решая это векторное
уравнение графическим способом, получим план скоростей для группы Асура,
состоящей из звеньев 2 и 4. В соответствии с векторным уравнением через конец
вектора
Пользуясь построенным планом скоростей, можно определить
угловую скорость
Для определения направления Аналогично строим план скоростей для группы Ассура (звенья 3 и 5) по уравнению:
и определяем угловую скорость шатуна AE:
Для определения направления Изложенным выше способом строим планы скоростей для остальных 11 положений. Результаты построения заносим в таблицу 1.1. Таблица 1.1
1.4 Построение планов ускоренийОпределяем ускорение точки А. Так как кривошип по условию движется равномерно (угловое ускорение равно нулю), то ускорение точки А состоит только из нормальной составляющей, которая равна:
Вектор
Из произвольной точки Переходим к группе Ассура (звенья 2, 4). Векторное ускорение для точки С группы имеет вид
Ускорение
Ускорение
Вычисляем его величину и откладываем в масштабе от точки а
плана ускорений в направлении от точки B к точке А механизма отрезок
Ускорение
Вектор
Зная
Направление углового ускорения определится после переноса
вектора Для группы Ассура (звенья 3, 5) построение выполняется аналогично по векторному уравнению:
Строим план ускорений для положения 2.
Строим план ускорений для положения 7.
Результаты построения заносим в таблицу 1.2 Таблица 1.2
1.5 Кинематические диаграммыДиаграммы строятся для 12 положений механизма, которые были изображены на плане положений. Полный оборот кривошипа ОА соответствует одному кинематическому циклу Рассмотрим построение диаграммы перемещения ползуна В При равномерном вращении кривошипа угол его поворота Масштаб перемещения
где Масштаб оси времени
где Т – период одного оборота кривошипа, который определяется по формуле:
Таким образом, для получения масштаба времени
Построение кривых
где Н и Н1 – полюсные расстояния диаграмм соответственно, мм. Далее стоит построить диаграмму угловых перемещений шатунов АС и BD. Угловое перемещение измеряют в градусах, отсчитывая его от направляющих ОЕ и ОВ. Поворот против часовой стрелки, относительно оси направляющих
ползунов принимаем за положительный. Масштабный коэффициент
Выполнив графическое дифференцирование диаграммы углового перемещения, получим диаграмму угловой скорости. Масштабный коэффициент для данной диаграммы
1.6 Сравнение результатов кинематического исследования, выполненного графическим и графоаналитическим методамиРезультаты кинематического исследования сводим в таблицу 3. Таблица 1.3
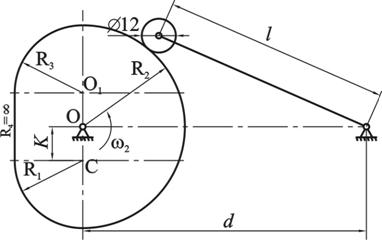
Расхождение результатов не превышает 5% Превышение 5% в расхождении значений ускорений точки В объясняется погрешностью при выполнении графического дифференцирования. 2 Кинематический анализ кулачкового механизма2.1 Построение плана положенийЗадан кулачковый механизм (рис. 2.1) с размерами: 1.
Радиус 2.
Радиус 3.
Радиус 4.
Расстояние 5.
Длина 6.
Расстояние 7.
Угловая скорость
Рис. 2.1 Кинематическая схема кулачкового механизма В соответствии с исходными данными строим в масштабе кулачек,
масштабный коэффициент при этом выбираем Задача анализа кулачкового механизма сводится к определению положений толкателя в зависимости от положения кулачка и установлению скоростей и ускорений толкателя. Для кулачкового механизма с вращательным движением толкателя, снабженным роликом, задача об определении положения и перемещения толкателя решается следующим образом. Центр вращения ролика всегда находится от действительного
профиля кулачка на расстоянии, равном радиусу ролика Дополнительно берем точки 2, 8, 9, 14, соответствующие
моменту перехода ролика от одного участка кулачка к другому (Под участком
понимаем часть профиля кулачка с одинаковым законом изменения профиля). Угловое
перемещение толкателя буде определять как разность углов произвольного
Линейное перемещение ролика будет пропорционально угловому перемещению:
2.2 Построение диаграммы перемещений толкателяДиаграмма перемещений толкателя строится следующим образом. Строим систему координат. По оси ординат откладываем
перемещения толкателя. По оси абсцисс будем откладывать угловое перемещение
кулачка, масштабный коэффициент равен Масштабный коэффициент перемещения толкателя 2.3 Построение диаграмм скорости и ускорения толкателя.Диаграмма скорости толкателя строится путем графического дифференцирования диаграммы перемещения методом хорд. Масштабный коэффициент диаграммы скорости толкателя:
где
Диаграмма ускорения строится методом графического дифференцирования диаграммы скорости. Масштабный коэффициент диаграммы ускорения равен
Для получения величины скорости необходимо ординату диаграммы скорости умножить на масштабный коэффициент. Для получения величины ускорения толкателя необходимо ординату диаграммы ускорения умножить на масштабный коэффициент. 2.4 Построение диаграммы изменения угла давления.Угол давления – это угол между вектором скорости толкателя и нормалью к точке касания толкателя и кулачка. Для каждого положения кулачка измеряем угол давления и строим зависимость угла давления от угла поворота кулачка. Масштабный коэффициент
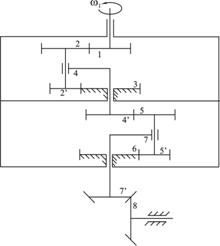
3 Кинематический анализ сложного зубчатого механизма3.1 Выходные данныеЗадана схема сложного зубчатого механизма, показанная на рисунке 3.1, для которой в таблице 3.1 представлены выходные данные: число зубьев, модуль зацепления, угловая скорость колеса 1 и радиусы колес, вычисленные по формуле:
где
Рис. 3.1 Определим незаданные размеры колес и водил
Таблица 3.1
Изображаем схему механизма в масштабе 3.2 Кинематический анализ сложного зубчатого механизма, выполненный аналитическим способомСхема зубчатого редуктора состоит из нескольких ступеней – двух планетарных редукторов Давида и пары с неподвижными осями. Передаточное отношение первого планетарного механизма Давида определяем от колеса 1 до водила 4.
где Передаточное отношение второго планетарного механизма Давида определяем от колеса 4’ до водила 7.
Передаточное отношение зубчатой пары 7’ – 8
Передаточное отношение редуктора
3.3 Кинематический анализ сложного зубчатого механизма, выполненный графическим способомПроводим снизу от схемы редуктора горизонтальную прямую.
Вдоль оси Проводим из точки А колеса 1 вертикальную линию до
пересечения с горизонтальной прямой. От точки пересечения перпендикулярно
откладываем в масштабе
Соединяем конец вектора Аналогично определяем законы распределения скоростей для остальных колес. Для построения плана угловых скоростей проведем две линии:
горизонталь и вертикаль. На вертикальной линии отложим масштабе значение
угловой скорости первого колеса Масштабный коэффициент
Определяем угловые скорости колес. Данные расчета приведены в таблице 3.2 Передаточное отношение редуктора определим из плана угловых скоростей
Таблица 3.2
3.4 Сравнение результатов кинематического анализаСравниваем передаточные отношения, найденные аналитическим и графическим способами.
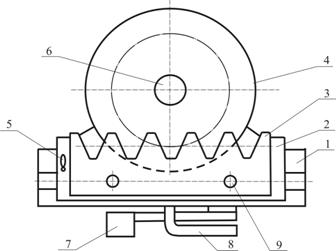
3.5 Синтез эвольвентного зацепленияНарезание эвольвентных профилей зубьев методом обкатки наиболее распространенный способ изготовления зубчатых колес
Рис. 3.2 Общий вид приспособления ТММ – 42 для вычерчивания профиля зубьев методом обкатки показан на рисунке 3.2. Основание 1 имеет паз для перемещения подвижной планки 2, на которой винтами 9 фиксируется рейка 3 и ось, вокруг которой поворачивается соединенные между собой два диска 4. Нижний диск имеет диаметр делительной окружности нарезаемого колеса. Концы стального троса, охватывающего диск, закреплены на подвижной планке. Натяжение троса обеспечивается с помощью рычага 5. На верхнем диске прижимной шайбой 6 закрепляется бумажный диск, имитирующий заготовку. Прерывистое перемещение рейки относительно заготовки обеспечивается храповым механизмом путем нажимом на клавишу 7. при каждом нажатии рейка перемещается влево на один шаг. Поворачивая рычаг 8 против часовой стрелки можно освободить подвижную планку от храпового механизма и перемещать ее вручную вправо или влево. Другое движение планки - радиальное. Это перемещение отсчитывается по шкале на планке и фиксируется винтами 9. Сначала подготавливаем бумажный диск заготовку и устанавливаем его в устройстве, фиксируя прижимной гайкой. Устанавливаем риски рейки напротив нулевого значения шкалы. Поворачивая рычаг 8, освобождаем планку от храпового механизма, переводим ее в крайнее правое положение и закрепляем. Рычагом 5 ослабляем натяжение троса и поворачиваем диск таким образом, что бы левый крайний зуб рейки совпадал с началом первого сектора заготовки и закрепляем трос. Обрисовываем карандашом профиль зубьев рейки. Нажимая клавишу 7, переводим рейку влево на один шаг и снова обрисовываем профиль зубьев. Продолжаем так делать, пока рейка не дойдет до конца влево. Для второго сектора смещаем рейку на 10 мм вниз ( Для третьего сектора смещаем рейку на 10 мм вверх ( Для исключения подрезания зуба находим относительный (
Для четвертого сектора устанавливаем смещение планки на Снимаем заготовку и в каждом секторе наносим по 4 окружности:
Определяем шаг по делительной окружности
4 Кинетостатический (силовой) анализ главного механизма4.1 Выходные данныеВыходные данные согласно заданию к курсовому проекту. 1. Схема двухпоршневого V - образного насоса (рис. 1.1) 2. Угловая скорость кривошипа 3. Погонная единица массы 4. Коэффициент 5. Коэффициент 6. Длина кривошипа 7. Длина шатуна 8. Неравномерность хода Задачей силового исследования является определение реакций в кинематических парах механизма, находящегося под действием внешних сил. Закон движения при этом считается заданным. Для того, что бы ведущее звено двигалось по заданному закону, необходимо к нему приложить так называемую уравновешивающую силу (или уравновешивающий момент), которая уравновешивает все силы и силы инерции. Определение уравновешивающей силы или уравновешивающего момента наряду с определением реакций в кинематических парах так же является задачей силового исследования механизма. Силовой расчет выполняется в порядке, обратном кинематическому исследованию, т. е. сначала ведется расчет группы Ассура, наиболее удаленной от начального механизма, затем предыдущей и т. д., и, наконец, начального механизма. 4.2 Определение действующих сил и сил инерцииОпределяем массу звеньев. Масса кривошипа АВ (с):
Масса шатунов АС и ВD (
Масса ползунов С и D (
Вес звеньев:
Центрами масс для линейных звеньев считаем середины межшарнирных расстояний, а для ползунов – точки С и D. Сила полезного сопротивления возникает при сопротивлении ползунов нагнетанию. Противоположное направление движение ползунов является холостым ходом. Для положения 2 механизма силs полезного сопротивления будут равны
где
Силы инерции в общем случае рассчитываются по формуле
где
Момент инерции не равен нулю будет для шатунов 2 и 3.
где
Направление сил инерции противоположно направлению ускорений. 4.3 Силовой расчет группы Ассура без учета сил трения4.3.1 Звенья 2-4.Изображаем отдельно группу Ассура, нагруженную действующими
силами и силами инерции. Отсоединив звено 2 от стойки 6 и кривошипа 1,
прикладываем в точках А и B силы Кинематическая пара 1-2 – вращательная, поэтому раскладываем ее на две составляющие
Реакция в поступательной паре 4-6 неизвестна по величине, но известна по направлению; направлена перпендикулярно движению. Определяем величину касательной составляющей, для чего составляем для звена 2 уравнение моментов относительно точки С.
Откуда
где Векторная сумма всех сил, действующих на группу Ассура, включая и силы инерции, равна нулю, т. е.
В этом уравнении два вектора В соответствии с последним векторным уравнением строим так
называемый план сил. Для этого выбираем масштаб построения Для определения реакции в кинематической паре 2-4 составляем уравнение равновесия звена 2, записанное в виде векторной суммы всех сил:
Используем уже построенный план сил, на котором соединяем
начало вектора Умножая полученные отрезки на масштабный коэффициент, получаем:
4.3.2 Звенья 3-5Изображаем отдельно группу Ассура, нагруженную действующими
силами и силами инерции. Отсоединив звено 3 от стойки 6 и кривошипа 1, прикладываем
в точках А и Е силы Кинематическая пара 1-3 – вращательная, поэтому раскладываем ее на две составляющие
Реакция в поступательной паре 5-6 неизвестна по величине, но известна по направлению; направлена перпендикулярно движению. Определяем величину касательной составляющей, для чего составляем для звена 3 уравнение моментов относительно точки Е.
Откуда
Векторная сумма всех сил, действующих на группу Ассура, включая и силы инерции, равна нулю, т. е.
В этом уравнении два вектора В соответствии с последним векторным уравнением строим так
называемый план сил. Для этого выбираем масштаб построения Для определения реакции в кинематической паре 3-5 составляем уравнение равновесия звена 3, записанное в виде векторной суммы всех сил:
Используем уже построенный план сил, на котором соединяем
начало вектора
4.4 Силовой расчет начального механизмаНа ведущее звено действуют вес кривошипа Ведущее звено под действием заданных сил не будет находиться
в равновесии, поэтому необходимо приложить уравновешивающую силу Составим уравнение моментов относительно точки О и определяем величину уравновешивающей силы:
Для определения реакции в кинематической паре кривошип-стойка составляем уравнение равновесия
4.5 Определение уравновешивающего момента с помощью рычага Н.Е. Жуковского.Уравновешивающий момент может быть определен при помощи теоремы Н. Е. Жуковского о «жестком рычаге», согласно которой сумма моментов всех сил, действующих на механизм, включая силы инерции, перенесенных параллельно самим себе в одноименные точки повернутого на 900 плана скоростей, относительно полюса, равна нулю. Таким образом, план скоростей представляется как жесткий рычаг, шарнирно закрепленный в полюсе и находящийся под действием сил в равновесии. По теореме Жуковского легко определить уравновешивающий момент. Решение проводим в такой последовательности: 1. Строим в масштабе повернутый на 900 план скоростейб механизма. 2. По теореме подобия находятся на плане скоростей все точки, в которых приложены все действующие силы. Моменты сил при этом раскладываются на пары сил таким образом, что бы звено, к которому они приложены, представляло собой плечо этой пары.
4.6 Сравнение уравновешивающих моментов, найденных двумя методамиУравновешивающий момент, определенный по методу Ассура
Уравновешивающий момент, определенный по методу Жуковского
Ошибка составляет
Ошибка не превышает 5%. Расчет сделан правильно. 4.7 Определение сил тренияОпределение сил трения
где
Сила трения направлена в сторону, противоположную относительному движению звена.
Возникающий во вращательной паре момент трения рассчитывается по формуле
где
4.8 Силовой расчет групп Ассура с учетом сил трения4.8.1 Звенья 2-4Определяем величину касательной составляющей, для чего составляем для звена 2 уравнение моментов относительно точки С.
Откуда
Векторная сумма всех сил, действующих на группу Ассура, включая и силы инерции, равна нулю, т. е.
В этом уравнении два вектора В соответствии с последним векторным уравнением строим так
называемый план сил. Для этого выбираем масштаб построения Для определения реакции в кинематической паре 2-4 составляем уравнение равновесия звена 2, записанное в виде векторной суммы всех сил:
Используем уже построенный план сил, на котором соединяем
начало вектора Умножая полученные отрезки на масштабный коэффициент, получаем:
4.8.2 Звенья 3-5Определяем величину касательной составляющей, для чего составляем для звена 3 уравнение моментов относительно точки С.
Откуда
Векторная сумма всех сил, действующих на группу Ассура, включая и силы инерции, равна нулю, т. е.
В этом уравнении два вектора В соответствии с последним векторным уравнением строим так
называемый план сил. Для этого выбираем масштаб построения Для определения реакции в кинематической паре 3-5 составляем уравнение равновесия звена 3, записанное в виде векторной суммы всех сил:
Используем уже построенный план сил, на котором соединяем
начало вектора
4.9 Силовой расчет начального механизмаСоставим уравнение моментов относительно точки О и определяем величину уравновешивающего момента:
Для определения реакции в кинематической паре кривошип-стойка составляем уравнение равновесия
5 Динамический анализ механизма. Подбор маховика5.1 Определение приведенных моментов движущих сил и полезного сопротивленияПриведенный момент сил полезного сопротивления для 12 положений механизма находим по формуле
Где
Результаты расчетов заносим в таблицу 5.1. Таблица 5.1
Строим график зависимости приведенного момента сил полезного сопротивления от угла поворота кривошипа, принимая масштабные коэффициенты:
5.2 Определение работы сил полезного сопротивления и движущих силНаиболее простой способ определения работы сил полезного
сопротивления и движущих сил – это метод графического интегрирования графика
зависимости момента сил полезного сопротивления от угла поворота кривошипа. Для
этого слева от начала координат откладываем произвольный отрезок длиной
Момент движущих сил будем считать постоянным, поэтому график
зависимости На графике 5.3 Графическое определение изменений кинетической энергииИзменения кинетической энергии
В новой системе координат 5.4 Определение приведенного момента инерции механизма для рабочего циклаПриведенным моментом инерции называется такой условный момент инерции, приложенный к звену приведения, который имеет кинетическую энергию такую же, как и кинетическая энергия всех звеньев. Звеном приведения является кривошип, кинетическая энергия которого определиться как
Кинетические энергии других звеньев находят в зависимости от вида движения, который они выполняют. Для вращательного движения
Для поступательного движения
Для двухпоршневого горизонтального насоса можно записать следующее уравнение определения приведенного момента инерции
По полученным данным строим график
Исходные данные и результаты расчетов приведены в таблице 5.2 Таблица 5.2
5.5 Методика построения диаграммы энергомасс (кривой Виттенбауэра) и нахождения по ней момента инерции маховикаДиаграмму энергомасс (зависимость К кривой Виттенбауэра проводят две касательные сверху и снизу. Углы наклона этих линий определяют по формулам:
где
Касательно к диаграмме под углом Данные касательные пересекут ось
5.6 Определение конструктивных размеров маховикаМаховик выполняется, как колесо с массивным ободом. Пренебрегая массой спиц и ступицы, имеем:
где
Расчет будем проводить методом последовательных приближений.
В первом приближении конструктивно задаемся средним диаметром
тогда
Массу маховика выражаем через его размеры
где Обычно принимают величину
Откуда находим
Полученный размер должен ориентировочно равен
Условие не выполняется, поэтому изменяем
Рис. 5.1
Условие выполняется. Находим остальные размеры.
5.7 Определение угловой скорости кривошипа за циклОпределяем угловую скорость кривошипа в зависимости от угла поворота:
где
Результаты расчетов сведены в таблицу Таблица 5.3
Определив для 12 положений угловую скорость кривошипа строим
график зависимости Литература 1. Артоболевский И.И., Теория механизмов и машин.- М.: Наука, 1975. 2. Баранов Г.Г. Курс теории механизмов и машин.- М.: Машиностроение, 1967.- 170 с. 3. Кореняко А.С. Курсовое проектирование по теории механизмов и машин. - Киев: Вища школа,1975. – 153 с. 4. Левитская О.Н., Левитский Н.И. Курс теории механизмов и машин.- М.: Машиностроение, 1985. – 291 с. |